![]()
A Minimal Training Setup on NLB Maze#
This example walks through a minimal training pipeline for decoding 2D hand velocity from motor cortex spiking activity, using the “jenkins_maze_train” recording from the Neural Latents Benchmark (NLB) MC_Maze dataset.
It is intended as a starting point for new users of torch_brain and brainsets, and shows how to:
Build a custom
Dataseton top of abrainsetsrecording.Sample fixed-length trials around a behavioral event using
TrialSampler.Train one of three small decoders (a linear readout, a bidirectional GRU, or a dilated TCN).
⚠ Note: Although this notebook will run on a CPU, it is recommended that you use a GPU runtime. If you’re on Google Colab, do: Runtime > Change runtime type > T4 GPU
Setup#
Install dependencies:
!pip install scikit-learn matplotlib torch
!pip install git+https://github.com/neuro-galaxy/torch_brain
And preprocess the dataset using brainsets
!brainsets prepare pei_pandarinath_nlb_2021 --raw-dir data/raw --processed-dir data/processed -s jenkins_maze_train
import matplotlib.pyplot as plt
import numpy as np
import torch
from torch import Tensor, nn
from tqdm.auto import tqdm
# Hyperparameters (feel free to play with these)
BIN_SIZE = 0.01 # seconds
BATCH_SIZE = 8
EPOCHS = 100
LR = 1e-3
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(f"Using device: {device}")
Using device: cuda
Defining a Simple & Custom Dataset#
Brainsets provides a dataset class for PeiPandarinathNLB2021 (which contains the NLB Maze dataset), which basically handles the file I/O.
We subclass this dataset and (re-)define two things on top of it’s file I/O:
get_sampling_intervals: Decides which time windows in the recording count as samples. Here, each sample is a 700 ms window around movement onset, and we split into train/val using the NLB-provided split indicator.__getitem__: Given a time-sliced sample, how one is it turned into model-compatible Tensors.
from typing import Literal
from torch_brain.data import Interval
from torch_brain.datasets import DatasetIndex, PeiPandarinathNLB2021
from torch_brain.utils import bin_spikes
class SimpleNLBMazeDataset(PeiPandarinathNLB2021):
sample_length = 0.7
out_dim = 2
out_sampling_rate = 1000.0
def __init__(self, root: str, split: Literal["train", "val"], bin_size: float):
# recording_ids picks which session(s) inside the dataset to load.
# We just want to load the maze_train session
super().__init__(root=root, recording_ids=["jenkins_maze_train"])
# This recording only specificies train and validation set
# and the test set is kept hidden for online evaluation
assert split in ("train", "val")
# store some attributes that are useful later
self.split = split
self.bin_size = bin_size
self.out_samples = round(self.sample_length * self.out_sampling_rate)
self.num_bins = round(self.sample_length / self.bin_size)
# get_unit_ids returns the list of neurons recorded in this session.
self.num_units = len(self.get_unit_ids())
# Contract between Datasets and Samplers:
# get_sampling_intervals() returns {recording_id: Interval} listing
# the windows the sampler may draw from.
# Sampler will emit one DatasetIndex per sample.
def get_sampling_intervals(self, *_args, **_kwargs):
rid = self.recording_ids[0] # since we only have 1 recording
recording = self.get_recording(rid)
# Taking trials to be relative to the movement onset time
# from 250ms before onset to 450ms after onset
# (as stated in the NLB paper Appendix A.5.1).
move_onset_times = recording.trials.move_onset_time
trials = Interval(move_onset_times - 0.25, move_onset_times + 0.45)
# The NLB dataset also provided us a default assignment of
# training and validation trials.
# `.select_by_mask()` is our standard way to filter an Interval
# down to a subset based on a boolean mask.
trial_split_indicator = recording.trials.split_indicator.astype(str)
train_trials = trials.select_by_mask(trial_split_indicator == "train")
val_trials = trials.select_by_mask(trial_split_indicator == "val")
if self.split == "train":
return {rid: train_trials}
elif self.split == "val":
return {rid: val_trials}
# `index` is a DatasetIndex(recording_id, start, end)
# produced by the sampler.
def __getitem__(self, index: DatasetIndex):
# super().__getitem__ returns a sliced view of the recording, with all
# modalities (.spikes, .units, .hand.vel, ...) already cropped (lazily).
data = super().__getitem__(index)
# In this example, we have designed all models to:
# - take in a Tensor of shape (Number of neurons, Number of bins), and
# - return a Tensor of shape (Number of output timestep, Output dimension).
# Spikes are an irregular event stream — bin them into a regular grid.
X = bin_spikes(data.spikes, num_units=len(data.units), bin_size=self.bin_size)
X = torch.from_numpy(X).float() # shape: (num_bins, num_units)
# Hand velocity is already a regularly-sampled signal, so we just rescale.
Y = data.hand.vel / 200.0 # appoximate z-score normalization
Y = torch.from_numpy(Y).float() # shape: (out_samples, out_dim)
return X, Y
Creating the Datasets, Samplers, and DataLoaders#
💡 This is where come across the main pattern for creating data pipelines with torch_brain:
Dataset tells the sampler where sampling is allowed,
Sampler decides what samples to load (by emitting
DatasetIndexobjects), andDataLoader batches the samples as usual.
from torch.utils.data import DataLoader # standard PyTorch loader
from torch_brain.samplers import TrialSampler
DATA_ROOT = "data/processed" # This is where we stored the processed dataset
train_ds = SimpleNLBMazeDataset(DATA_ROOT, split="train", bin_size=BIN_SIZE)
# We want to sample "one-trial-at-a-time", so we use the TrialSampler
train_sampler = TrialSampler(
sampling_intervals=train_ds.get_sampling_intervals(),
shuffle=True,
)
# Note the sampler is passed explicitly; it is not the default random/sequential
# sampler PyTorch picks for an indexable dataset.
train_loader = DataLoader(train_ds, batch_size=BATCH_SIZE, sampler=train_sampler)
print(f"Number of units: {train_ds.num_units}")
print(f"Number of training samples: {len(train_sampler)}")
# Validation Dataset, Sampler, and DataLoader
val_ds = SimpleNLBMazeDataset(DATA_ROOT, split="val", bin_size=BIN_SIZE)
val_sampler = TrialSampler(sampling_intervals=val_ds.get_sampling_intervals())
val_loader = DataLoader(val_ds, batch_size=BATCH_SIZE, sampler=val_sampler)
print(f"Number of validation samples: {len(val_sampler)}")
print(f"Number of units: {train_ds.num_units}")
print(f"Bins per sample: {train_ds.num_bins} (bin size = {BIN_SIZE}s)")
print(f"Target samples: {train_ds.out_samples} (at {train_ds.out_sampling_rate} Hz)")
print(f"Train trials: {len(train_ds.get_sampling_intervals()[train_ds.recording_ids[0]])}")
print(f"Val trials: {len(val_ds.get_sampling_intervals()[val_ds.recording_ids[0]])}")
Number of units: 142
Number of training samples: 75
Number of validation samples: 25
Number of units: 142
Bins per sample: 70 (bin size = 0.01s)
Target samples: 700 (at 1000.0 Hz)
Train trials: 75
Val trials: 25
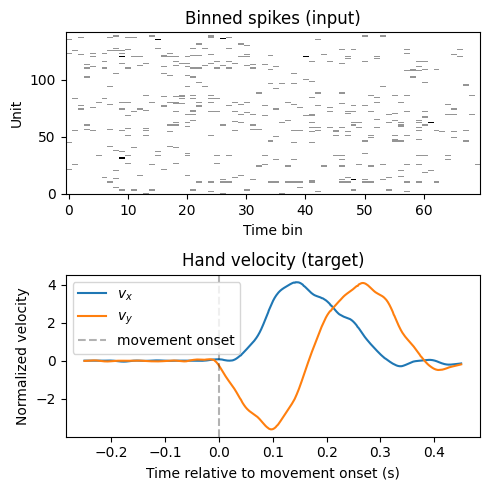
Let’s first peek at a single sample to confirm the shapes match what we expect, and visualize the binned spikes (input) and hand velocity (target) for one trial.
first_sample_index = next(iter(train_sampler))
print(
f"First sample:\n"
f" recording_id: {first_sample_index.recording_id},\n"
f" start time: {first_sample_index.start},\n"
f" end time: {first_sample_index.end}\n"
)
X, Y = train_ds[first_sample_index]
print(f"X shape: {tuple(X.shape)} (num_bins, num_units)")
print(f"Y shape: {tuple(Y.shape)} (out_samples, out_dim)")
fig, axes = plt.subplots(2, 1, figsize=(5, 5))
axes[0].imshow(X.T.numpy(), aspect="auto", cmap="Greys", origin="lower", interpolation="nearest")
axes[0].set_title("Binned spikes (input)")
axes[0].set_xlabel("Time bin")
axes[0].set_ylabel("Unit")
t = np.linspace(-0.25, 0.45, train_ds.out_samples)
axes[1].plot(t, Y[:, 0].numpy(), label="$v_x$")
axes[1].plot(t, Y[:, 1].numpy(), label="$v_y$")
axes[1].axvline(0, color="k", linestyle="--", alpha=0.3, label="movement onset")
axes[1].set_title("Hand velocity (target)")
axes[1].set_xlabel("Time relative to movement onset (s)")
axes[1].set_ylabel("Normalized velocity")
axes[1].legend()
plt.tight_layout()
plt.show()
First sample:
recording_id: jenkins_maze_train,
start time: 124.188,
end time: 124.888
X shape: (70, 142) (num_bins, num_units)
Y shape: (700, 2) (out_samples, out_dim)
The Model#
Three small decoders are defined in the hidden cells below: Linear, GRU, and TCN.
Linear: flatten + a single
nn.Linearlayer.GRU: bidirectional GRU, then a per-timestep linear readout and an interpolation to upsample from
num_binstoout_samples.TCN: a stack of dilated 1D convolutions, followed by the same interpolation + readout.
All three follow the same interface:
They take (batch, num_bins, num_units) and return (batch, out_samples, out_dim):
Model Definitions#
Feel free to look around here!
Linear#
GRU#
TCN#
Instantiating the model#
model = GRU( # try: Linear, GRU, TCN
in_units=train_ds.num_units,
in_bins=train_ds.num_bins,
out_dim=train_ds.out_dim,
out_samples=train_ds.out_samples,
).to(device)
num_params = sum(p.numel() for p in model.parameters() if p.requires_grad)
print(f"\nTrainable parameters: {num_params:,}")
print(model)
Trainable parameters: 154,626
GRU(
(gru): GRU(142, 64, num_layers=2, batch_first=True, dropout=0.2, bidirectional=True)
(readout): Linear(in_features=128, out_features=2, bias=True)
)
Training#
A standard PyTorch loop! MSE loss against the hand velocity, AdamW optimizer, R² score on the validation set at the end of each epoch.
from sklearn.metrics import r2_score
optim = torch.optim.AdamW(model.parameters(), lr=LR)
val_r2_history = []
for _epoch in (epoch_pbar := tqdm(range(EPOCHS))):
model.train()
for X, Y in train_loader:
X, Y = X.to(device), Y.to(device)
pred = model(X)
loss = nn.functional.mse_loss(pred, Y)
optim.zero_grad()
loss.backward()
optim.step()
with torch.no_grad():
model.eval()
preds, targets = [], []
for X, Y in val_loader:
X, Y = X.to(device), Y.to(device)
preds.append(model(X))
targets.append(Y)
pred = torch.cat(preds).flatten(0, 1).cpu()
target = torch.cat(targets).flatten(0, 1).cpu()
r2 = r2_score(target, pred)
val_r2_history.append(r2)
epoch_pbar.set_description(f"Val R²: {r2:.3f}")
Val R²: 0.681: 100%|██████████| 100/100 [00:10<00:00, 9.52it/s]
Evaluation#
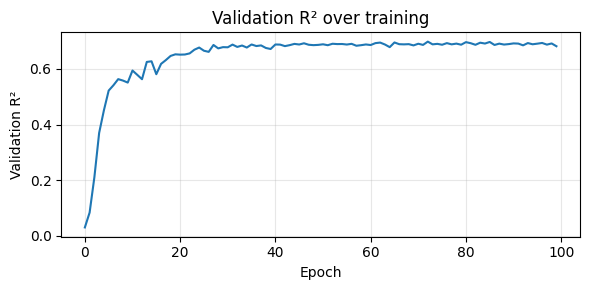
Plot the R² curve over training and compare predicted vs. actual hand velocity on one validation trial.
fig, ax = plt.subplots(figsize=(6, 3))
ax.plot(val_r2_history)
ax.set_xlabel("Epoch")
ax.set_ylabel("Validation R²")
ax.set_title("Validation R² over training")
ax.grid(alpha=0.3)
plt.tight_layout()
plt.show()
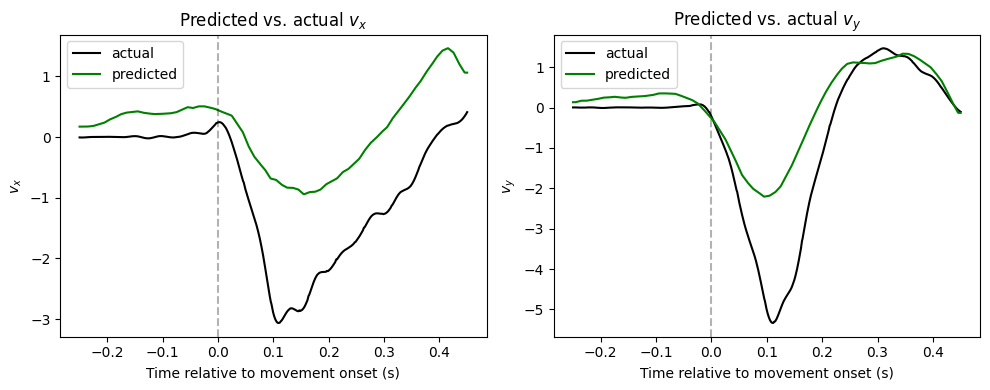
Let’s look at an example how our model’s predictions compare with the ground truth!
model.eval()
with torch.no_grad():
X, Y = val_ds[next(iter(val_sampler))]
pred = model(X.unsqueeze(0).to(device)).squeeze(0).cpu()
t = np.linspace(-0.25, 0.45, val_ds.out_samples)
fig, axes = plt.subplots(1, 2, figsize=(10, 4), sharex=False)
names = ["$v_x$", "$v_y$"]
# Plot $v_x$ and $v_y$
for i, name in enumerate(names):
axes[i].plot(t, Y[:, i].numpy(), label="actual", color="k")
axes[i].plot(t, pred[:, i].numpy(), label="predicted", color="green")
axes[i].axvline(0, color="k", linestyle="--", alpha=0.3)
axes[i].set_xlabel("Time relative to movement onset (s)")
axes[i].set_ylabel(name)
axes[i].legend(loc="upper left")
axes[0].set_title("Predicted vs. actual $v_x$", usetex=False)
axes[1].set_title("Predicted vs. actual $v_y$", usetex=False)
plt.tight_layout()
plt.show()
![]()